Reinier Kuppens1, Wouter Wolfslag1
10:30 - 13:00 | Tue 22 May | podN | [email protected]
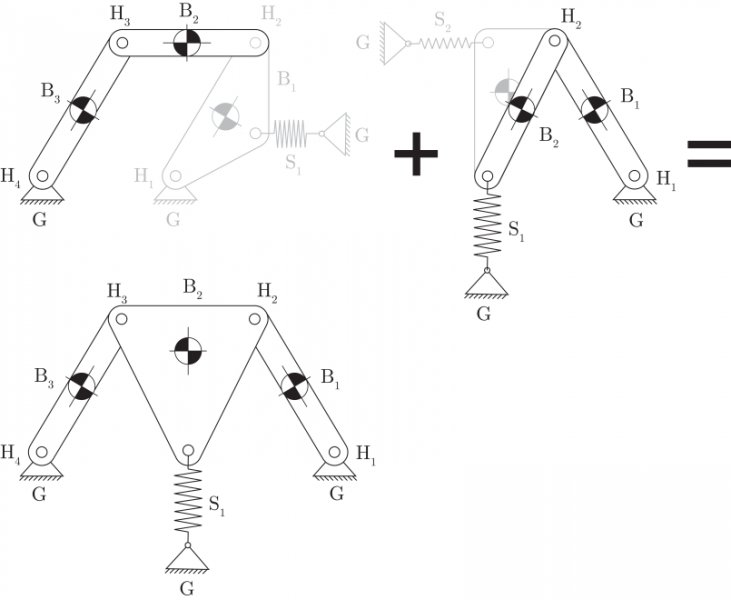
Robots would perform better when their mechanical structure is specifically designed for their designated task, for instance by adding spring mechanisms. However, designing such mechanisms, which match the dynamics of the robot with the task, is hard and time consuming. To assist designers, a platform that automatically designs dynamical mechanisms is needed. This paper introduces a novel string-based representation for mechanisms, including evolutionary operators, that allows an evolutionary algorithm to automatically design dynamical mechanisms for a designated task. The mechanism representation allows simultaneous optimization of topology and parameters. Simulation experiments investigate various algorithms to obtain best optimization performance. We show the efficacy of the representation, operators and evolutionary algorithm by designing mechanisms that track straight lines and ellipses by virtue of both their kinematic and dynamic properties.
{kind=link}