Shotaro Mori1, Kazutoshi Tanaka2, Satoshi Nishikawa, Ryuma Niiyama2, Yasuo Kuniyoshi1
10:30 - 13:00 | Tue 22 May | podN | [email protected]
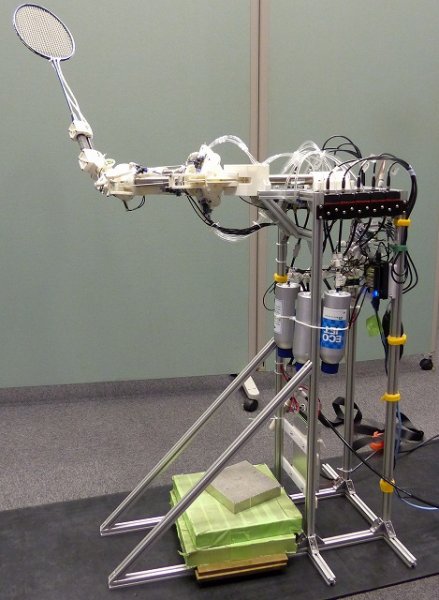
Sports, especially badminton, require participants to perform dynamic and skillful motions. Previous robots have had difficulty in performing like a human because of their severe limitations of low operating speed, heavy bodies, and simplistic mechanisms. In this paper, we propose a new robot design that consists of a structure integrated with pneumatic actuators and noninterfering many-degree-of-freedom joints, for the realization of a high-speed and lightweight humanoid robot. We made a four-degree-of-freedom robot arm for badminton, which is an especially dynamic sport, aiming for maximum speed while meeting geometric requirements. The robot swung with a racket-head speed of 21 [m/s], which is a value higher than speeds achieved by previous robotic arms. The robot also realized a skillful shot, namely the spin net shot, which cannot be performed by previous badminton robots having simple mechanisms. A pneumatic robot is considered difficult to control, especially in terms of feedback control. We found that the reproducibility of the robot was as fine as 1040 [mm] at the racket head for four kinds of strong swings. Using feedforward control, we also conducted an experiment in which the robot hit a flying shuttle, and achieved a high hitting rate of 69.7% for powerful swings. We believe that this research expands the possibilities of the pneumatic robot and is the first step toward developing a skillful humanoid badminton robot.
{kind=link}