Huaiguang Yang1, Liang Ding1, Haibo Gao1, Lan Huang1, Junlong Guo2, Chao Chen1, Zongquan Deng1
10:30 - 13:00 | Tue 22 May | podM | [email protected]
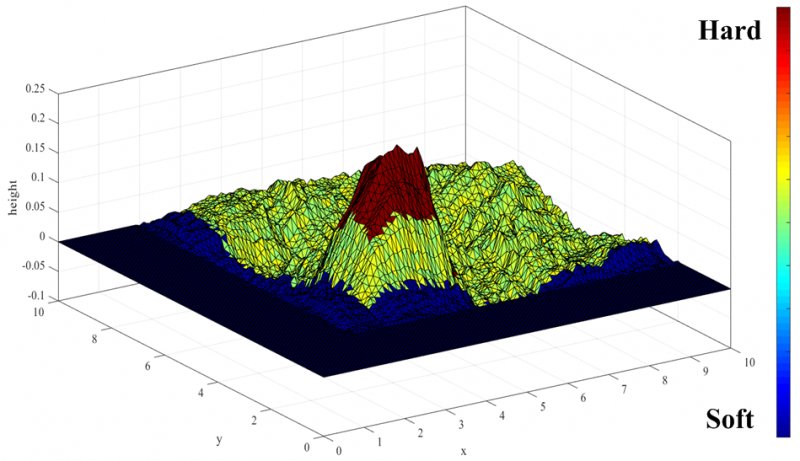
Simulation of planetary rovers moving on complex terrains is critical for Mars exploration. Equivalent stiffness is proposed and used to characterize the pressure-sinkage property of terrain, while friction angle to characterize the shearing property. Terramechanics model for calculating forces between rigid wheel and soil is proved to be the same with that contact model for calculating forces between rigid wheel and rock. A Digital Elevation Map with Physical Properties is developed and applied to simulate terrain physical properties along with its geometry information. The established methods are validated using simulation and experimental tests with a three-wheel-rover.
{kind=link}