Nils Wilde1, Dana Kulić2, Stephen L. Smith2
10:30 - 13:00 | Tue 22 May | podK | [email protected]
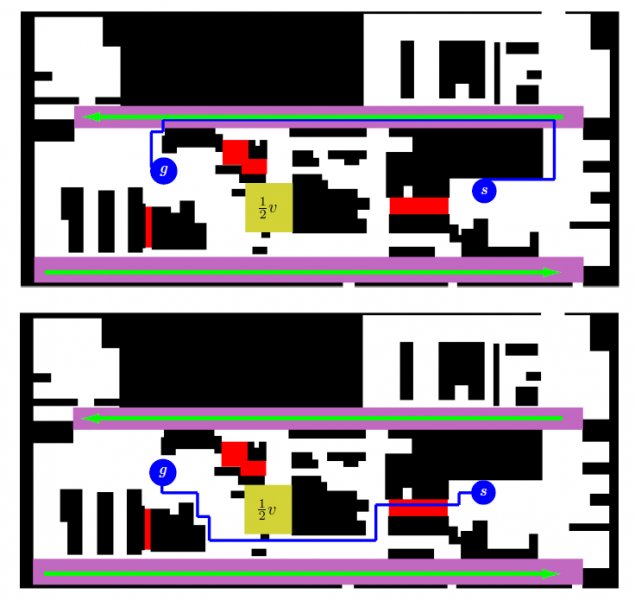
In this paper we develop an approach for learning user preferences for complex task specifications through human-robot interaction. We consider the problem of planning robot motion in a known environment, but where a user has specified additional spatial and temporal constraints on allowable robot motions. To illustrate the impact of the user's constraints on performance, we iteratively present users with alternative solutions on an interface. The user provides a ranking of alternate paths, and from this we learn about the importance of different constraints. This allows for an accessible method for specifying complex robot tasks. We present an algorithm that iteratively builds a set of constraints on the relative importance of each user constraint, and prove that with sufficient interaction, the algorithm determines a user-optimal path. We demonstrate the practical performance by simulating realistic material transport scenarios in industrial facilities.
{kind=link}