David Fridovich-Keil1, Sylvia Herbert2, Jaime F. Fisac3, Sampada Deglurkar4, Claire Tomlin4
10:30 - 13:00 | Tue 22 May | podG | [email protected]
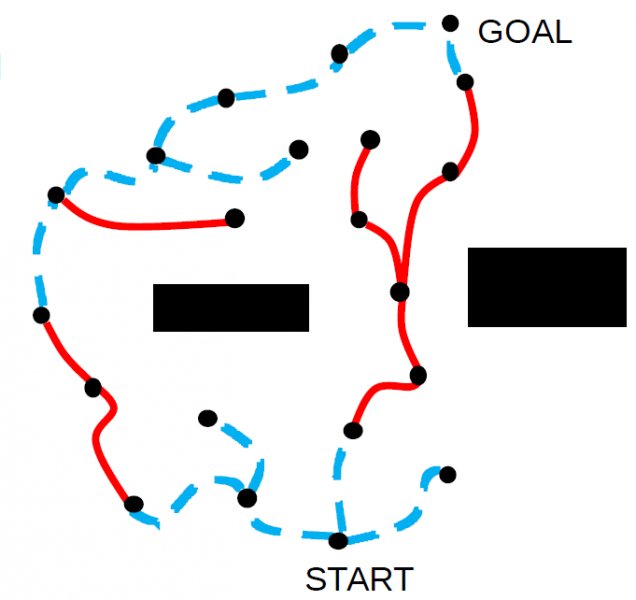
Motion planning is an extremely well-studied problem in the robotics community, yet existing work largely falls into one of two categories: computationally efficient but with few if any safety guarantees, or able to give stronger guarantees but at high computational cost. This work builds on a recent development called FaSTrack in which a slow offline computation provides a modular safety guarantee for a faster online planner. We introduce the notion of meta-planning in which a refined offline computation enables safe switching between different online planners. This provides autonomous systems with the ability to adapt motion plans to a priori unknown environments in real-time as sensor measurements detect new obstacles, and the flexibility to maneuver differently in the presence of obstacles than they would in free space, all while maintaining a strict safety guarantee. We demonstrate the meta-planning algorithm both in simulation and in hardware using a small Crazyflie 2.0 quadrotor.
{kind=link}