Daisuke Tanaka1, Solvi Arnold1, Kimitoshi Yamazaki1
10:30 - 13:00 | Tue 22 May | podE | [email protected]
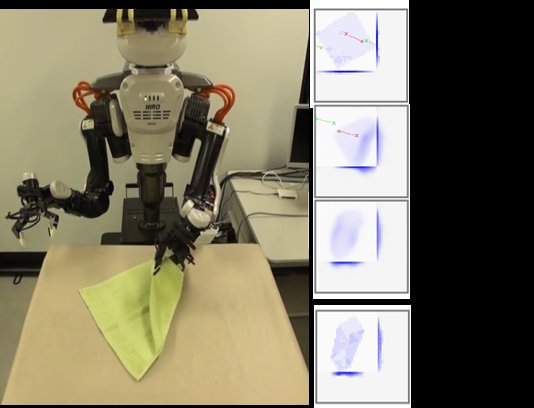
In this paper, we present a motion planning method for automatic operation of cloth products. The problem setting we adopt here that the current shape state of a cloth product and the shape state of the goal are given. It is necessary to decide where and what kind of manipulation is to be applied, and it is not always possible to arrive at the goal state by a single operation; that is, multiple operations might be necessary. To this problem, we propose a novel motion planning method. Our method directly connects cloth manipulations with shape changes of the cloth, consisting of deep neural network structure. The effectiveness of the proposed method was confirmed by simulation and real robot experiments.
{kind=link}