Michiel Plooij1, Urs Keller2, Bram Sterke3, Salif Komi4, Heike Vallery5, Joachim Von Zitzewitz4
10:30 - 13:00 | Tue 22 May | podC | [email protected]
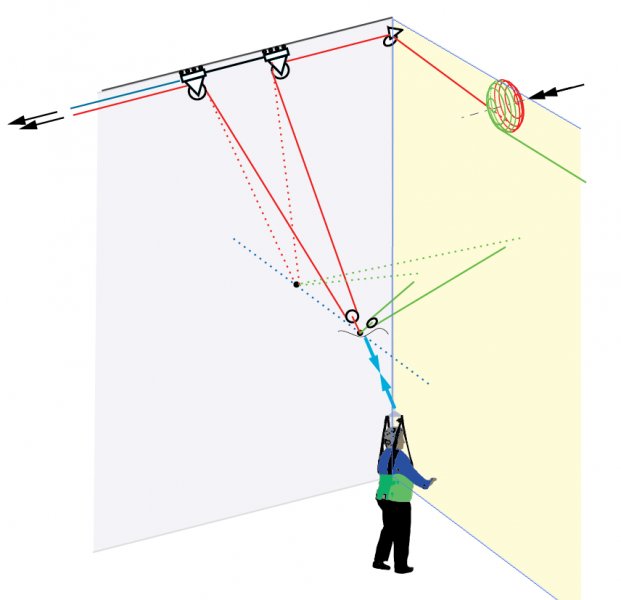
Body weight support (BWS) systems are widely used in gait research and rehabilitation. This paper introduces a new 3D overground BWS system, called the RYSEN. The RYSEN is designed to be intrinsically safe and low power consuming, while still performing at least as well as existing BWS systems regarding human-robot interaction. These features are mainly achieved by decoupling degrees of freedom between motors: slow/high-torque motors for vertical motion and fast/low-torque motors for horizontal motion. This paper explains the design and evaluates its performance on power consumption and safety. Power consumption is expressed in terms of the sum of the positive mechanical output power of all motor axes. Safety is defined as the difference between the mechanical power available for horzontal and vertical movements and the mechanical power that is needed to perform its task. The results of the RYSEN are compared to the performance of three similar systems: a gantry, the FLOAT and a classic cable robot. The results show that the RYSEN and a gantry consume approximately the same amount of power. The amount is approximately half the power consumed by the next best system. For the safety, the gantry is taken as the benchmark, because of its perfect decoupling of directions. The RYSEN has a surplus of 268 W and 126 W for horizontal and vertical movements respectively. This is significantly lower than the next best system, which has a surplus of 1088 W and 1967 W respectively.
{kind=link}