Yash Chitalia1, Xuefeng Wang2, Jaydev Desai1
10:30 - 13:00 | Tue 22 May | podA | [email protected]
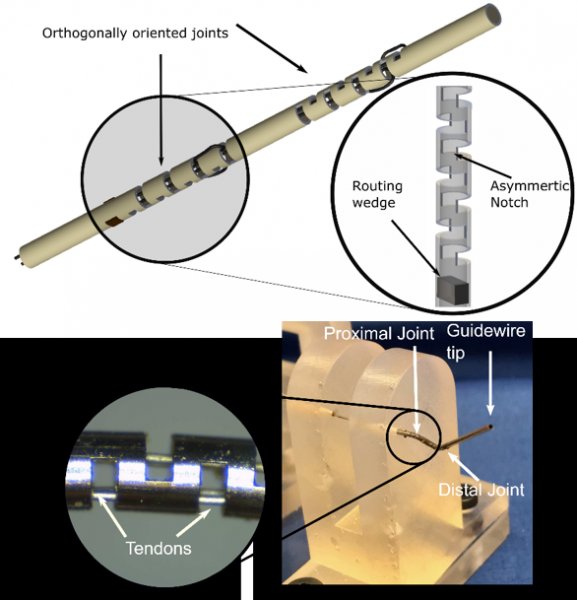
In most cases of peripheral arterial disease (PAD), the operating surgeon must use a variety of catheters riding on a thin wire known as a guidewire. This guidewire must be manually navigated through a tortuous pathway of arteries to arrive at the diseased area. Automation of the guidewire therefore reduces surgeon effort and minimizes the time required for a PAD procedure, but is restricted by the size constraints of a standard guidewire. This work presents the design of a robotically actuated 2 degree-of-freedom (DoF) guidewire tip comprised of joints laser micro-machined into a 0.78 mm (< 2.4 Fr) Nitinol tube. We present an analysis of the notch joint used as a building block in the robot and a control strategy for this type of a joint. The experimental results show that tendon force is an important observable quantity that can be used as a shape sensing mechanism for this type of a joint in practical control applications.
{kind=link}