Pilar Zhang Qiu1, Yongxuan Tan1, Oliver Thompson1, Bennet Cobley1, Thrishantha Nanayakkara1
10:30 - 10:45 | Tue 25 Oct | Rm2 (Room B-1) | TuA-2.3
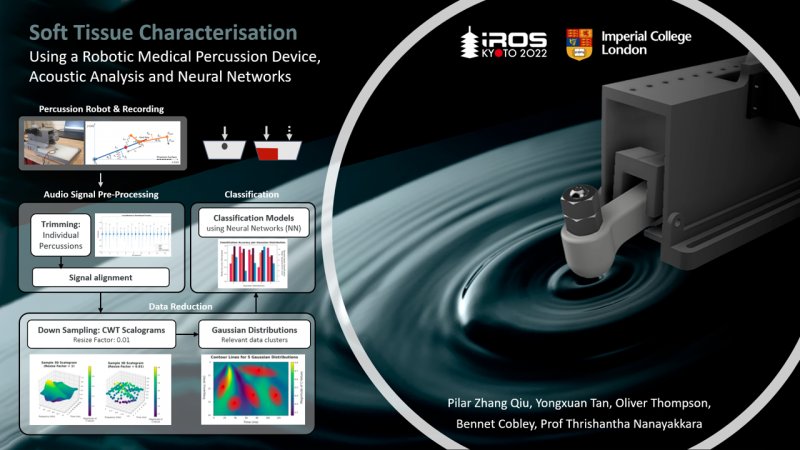
Medical percussion is a common manual examination procedure used by physicians to determine the state of underlying tissues from their acoustic responses. Although it has been used for centuries, there is a limited quantitative understanding of its dynamics, leading to subjectivity and a lack of detailed standardisation. This paper presents a novel compliant two-degree-of-freedom robotic device inspired by the human percussion action, and validates its performance in two tissue characterisation experiments. In Experiment 1, spectrotemporal analysis using 1-D Continuous Wavelet Transform (CWT) proved the potential of the device to identify hard nodules, mimicking lipomas, embedded in silicone phantoms representing a patient’s abdominal region. In Experiment 2, Gaussian Mixture Modelling (GMM) and Neural Network (NN) predictive models were implemented to classify composite phantom tissues of varying density and thickness. The proposed device and methods showed up to 97.5% accuracy in the classification of phantoms, proving the potential of robotic solutions to standardise and improve the accuracy of percussion diagnostic procedures.
{kind=link}