Justin K. Yim1, Bajwa Roodra Pratap Singh2, Eric K. Wang3, Roy Featherstone2, Ronald Fearing4
11:45 - 12:00 | Tue 2 Jun | Room T10 | TuB10.3
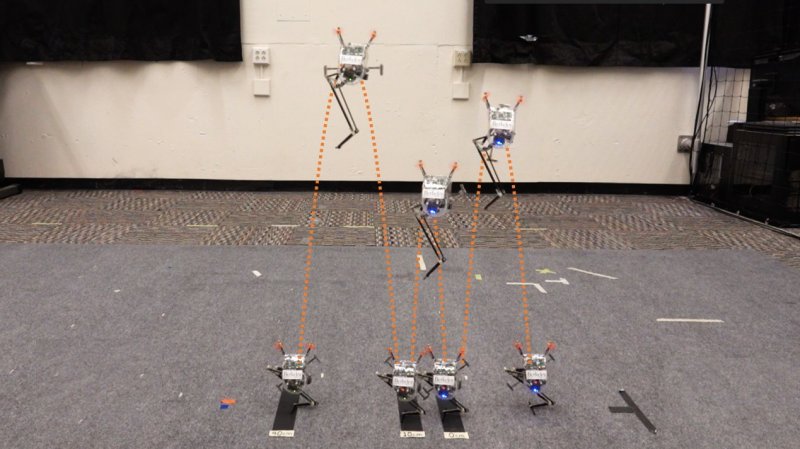
Prior work has addressed the control of continuous jumping by setting touchdown angle in flight, but greater precision can be obtained by using liftoff angle in stance to direct individual leaps. We demonstrate targeted leaping and landing on a narrow foot with a small, single leg hopping robot, Salto-1P. Accurate and reliable leaping and landing are achieved by the combination of stance-phase balance control based on angular momentum, a launch trajectory that stabilizes the robot at a desired launch angle, and an approximate expression for selecting touchdown angle before landing. Furthermore, dynamic transitions between standing, hopping, and standing again are now possible in a robot with a narrow foot. We also present approximate bounds on acceptable velocity estimate and angle errors outside of which balanced landing is no longer possible. Compared to a prior Spring Loaded Inverted Pendulum (SLIP)-like gait, the jump distance standard deviation is reduced from 9.2 cm to 1.6 cm for particular jumps, now enabling precise jumps to narrow targets.
{kind=link}