Takuya Umedachi1, Yoshihiro Kawahara2
10:45 - 12:00 | Mon 20 May | Room 220 POD 03 | MoA1-03.5
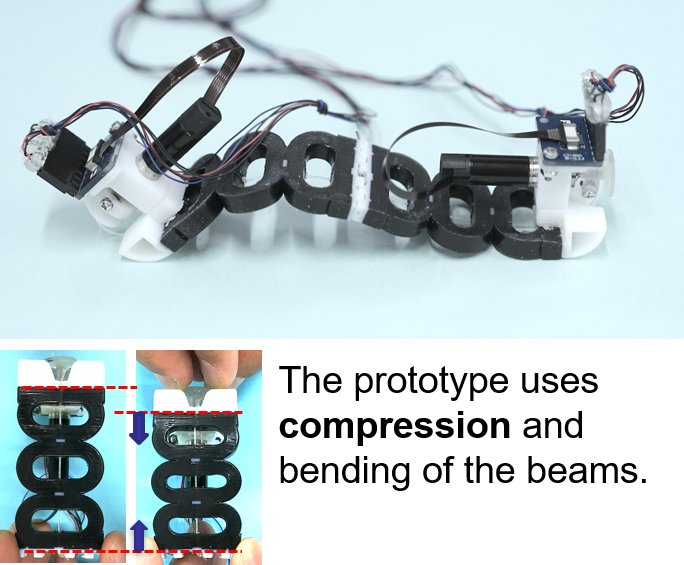
Multimodal deformations of soft materials such as compression and bending are a commonplace event on soft-bodied animals (e.g., worms) and soft-bodied robots. Usually, such deformation modes are separately analyzed or constrained to decrease the degrees of freedom when one design motion of the soft-bodied robots. This paper proposes to use multiple deformation modes and presents a highly deformable crawling robot that employs both compression and bending deformations simultaneously during the locomotion. This locomotion gait is inspired by the motion analysis experiment of a biological caterpillar, i.e., crawling gait of a silkworm Bombyx mori. Based on the biological experiment we propose a compressive/bendable beam and develop a crawling robot using the proposed beam. The experimental results of the simulation and the prototype demonstrate that the combination of the multiple deformation modes can contribute to the locomotion speed increase. This also indicates that we can design an enormous variety of locomotion gaits by combining multiple deformation modes, which may increase the adaptability of soft-bodied robots for use in our living and natural environments. These results shed new light on how to design behavioral diversity of soft-bodied robots.
{kind=link}