Yixiao Wang1, Chase Frazelle2, Richa Sirohi3, Liheng Li4, Ian Walker2, Keith Evan Green3
10:45 - 12:00 | Mon 20 May | Room 220 POD 03 | MoA1-03.3
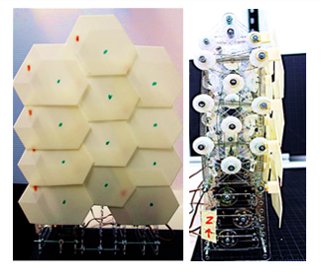
Developments of robot arms are countless, but there has been little focus on robot surfaces for the reshaping of a habitable space—especially compliant surfaces. In this paper we introduce a novel, tendon-driven, robot surface comprised of aggregated, overlapping panels organized in a herringbone pattern. The individual 3D-printed panels and their behavior as an aggregation are inspired by the form and behavior of a pinecone. This paper presents our concept, design, and realization of this robot, and compares our prototype to simulations of four physical configurations that are formally distinct and suggestive of how the surface might be applied to habitable, physical space in response to human needs and wants. For the four configurations studied, we found a validating match between prototype and simulations. The paper concludes with a consideration of potential applications for robot surfaces like this one.
{kind=link}