Jiawei Xu1, Diego Salazar-Dantonio1, Dominic Ammirato1, David Saldana1
15:00 - 15:06 | Tue 3 Oct | 251ABC | TuBT11.11
15:30 - 17:00 | Tue 3 Oct | Hall E - Track 11 | TuBIP-11.11
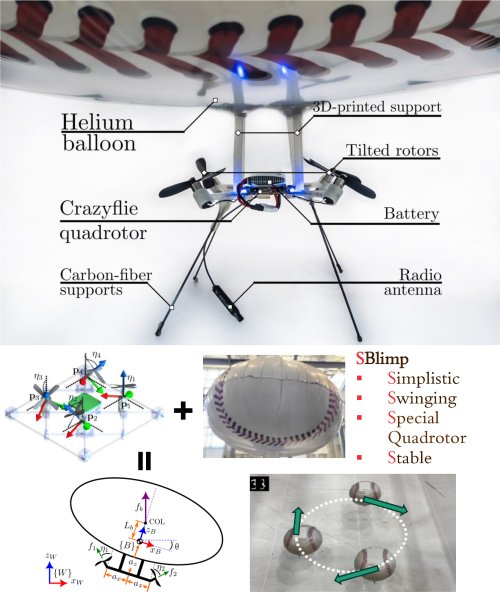
We present an aerial vehicle composed of a custom quadrotor with tilted rotors and a helium balloon, called SBlimp. We propose a novel control strategy that takes advantage of the natural stable attitude of the blimp to control translational motion. Different from cascade controllers in the literature that controls attitude to achieve desired translational motion, our approach directly controls the linear velocity regardless of the heading orientation of the vehicle. As a result, the vehicle swings during the translational motion. We provide a planar analysis of the dynamic model, demonstrating stability for our controller. Our design is evaluated in numerical simulations with different physical factors and validated with experiments using a real-world prototype, showing that the SBlimp is able to achieve stable translation regardless of its orientation.
{kind=link}