15:00 - 16:40 | Thu 1 Jun | PODS 23-24 (Posters) | ThPO2S-11.05
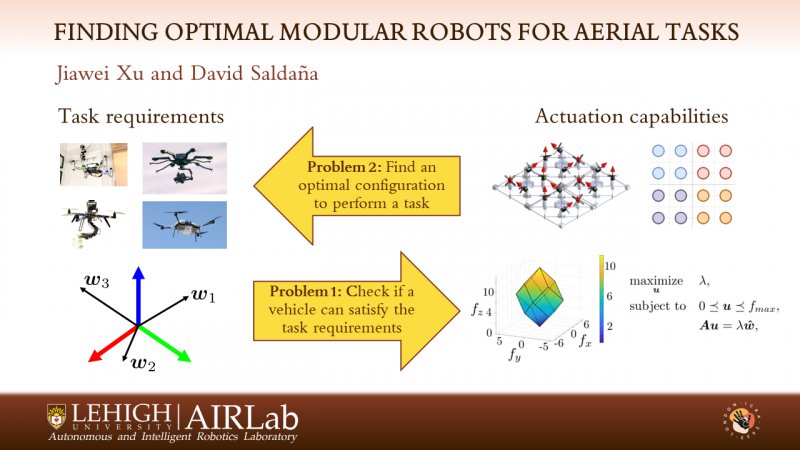
Traditional aerial vehicles have limitations in their capabilities due to actuator constraints, such as motor saturation. The hardware components and their arrangement are designed to satisfy specific requirements and are difficult to modify during operation. To address this problem, we introduce a versatile modular multi-rotor vehicle that can change its capabilities by reconfiguration. Our modular robot consists of homogeneous cuboid modules, propelled by quadrotors with tilted rotors. Depending on the number of modules and their configuration, the robot can expand its actuation capabilities. In this paper, we build a mathematical model for the actuation capability of a modular multi-rotor vehicle and develop methods to determine if a vehicle is capable of satisfying a task requirement. Based on this result, we find the optimal configurations for a given task. Our approach is validated in realistic 3D simulations, showing that our modular system can adapt to tasks with varying requirements.
{kind=link}