Thomas Sears1, Joshua Marshall1
13:50 - 14:00 | Tue 25 Oct | Rm9 (Room G) | TuB-9.9
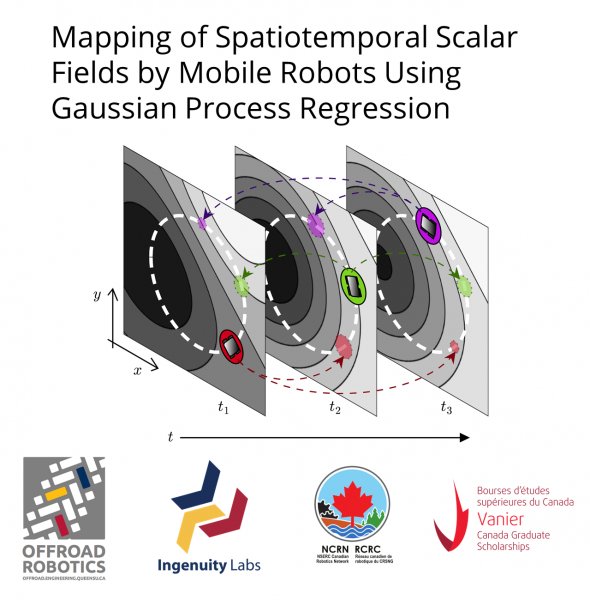
Spatiotemporal maps are data-driven estimates of time changing phenomena. For environmental science, rather than collect data from an array of static sensors, a mobile sensor platform could reduce setup time and cost, maintain flexibility to be deployed to any area of interest, and provide active feedback during observations. While promising, mapping is challenging with mobile sensors because vehicle constraints limit not only where, but also when observations can be made. By assuming spatial and temporal correlations in the data through kernel functions, this paper uses Gaussian process regression (GPR) to generate a maximum likelihood estimate of the phenomenon while also tracking the estimate uncertainty. Spatiotemporal mapping by GPR is simulated for a single fixed-path mobile robot observing a latent spatiotemporal scalar field. The learned spatiotemporal map captures the structure of the latent scalar field with the largest uncertainties in areas the robot never visited.
{kind=link}