Vincent Groenhuis1, Gijs Rolff2, Koen Bosman3, Leon Abelmann1, Stefano Stramigioli1
17:15 - 17:30 | Mon 24 Oct | Rm2 (Room B-1) | MoC-2.6
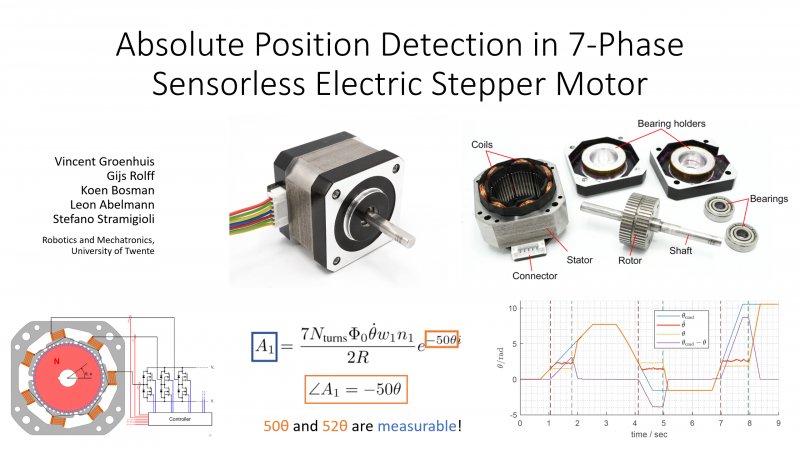
Absolute position detection in sensorless electric stepper motors potentially allows for higher space efficiency, improved shock resistance, simplified installation, reduced number of parts and lowered cost. A prototype is demonstrated measuring 42 x 52 x 34 mm³ with seven coils arranged in a star configuration. The rotor is ø25.8 x 12.5 mm² and has 51 teeth which are irregularly spaced. The coil currents are measured during motion in order to reconstruct the absolute position of the motor. Calibration and smoothing techniques are used to reduce systematic and stochastic measurement errors, respectively. The motor is able to detect and correct its position after externally-induced stalls at the tested motor speeds from 40 rpm to 108 rpm. The holding torque is 0.23 Nm at an armature current of 1 A; on average the torque is 7% lower than that of a reference bipolar stepper motor with the same dimensions. The results show that dynamic position sensing and correction are possible for a range of velocities, but not at standstill. The driver requires seven current sensors and sufficient computational power, and proper calibration of motor intrinsics is required beforehand. The presented technology could make existing 3-D printers and other machines with open-loop stepper motors more robust and increase the range of operating speeds and accelerations, without the adverse side-effects of increased complexity and cost associated with dedicated position sensors.
{kind=link}