Tony G. Chen1, Kenneth Hoffmann1, Jun En Low1, Keiko Nagami1, David Lentink2, Mark Cutkosky1
16:15 - 16:30 | Mon 24 Oct | Rm1 (Room A) | MoC-1.2
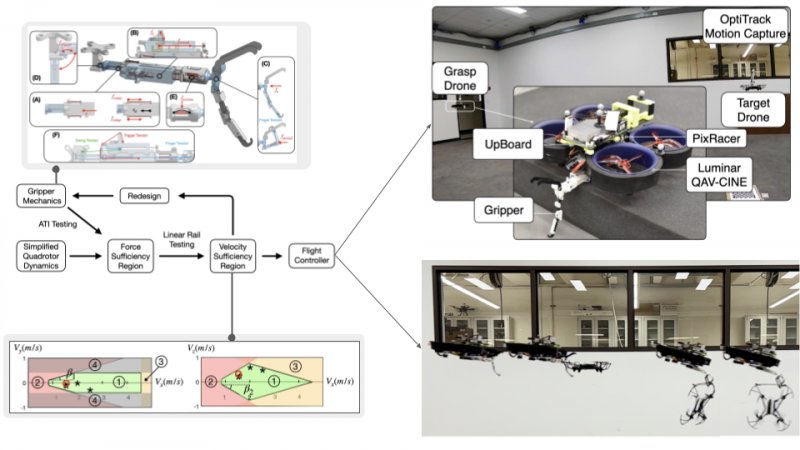
A largely untapped potential for aerial robots is to capture airborne targets in flight. We present an approach in which a simple dynamic model of a quadrotor/target inter- action leads to the design of a gripper and associated velocity sufficiency region with a high probability of capture. A model of the interaction dynamics maps the gripper force sufficiency region to an envelope of relative velocities for which capture should be possible without exceeding the capabilities of the quadrotor controller. The approach motivates a gripper design that emphasizes compliance and is passively triggered for a fast response. The resulting gripper is lightweight (23g) and closes within 12 ms. With this gripper, we demonstrate in-flight experiments that a 550g drone can capture an 85g target at various relative velocities between 1m/s and 2.7m/s.
{kind=link}