Yahav Avigal1, Lars Berscheid2, Tamim Asfour3, Torsten Kroeger4, Ken Goldberg1
10:00 - 10:15 | Mon 24 Oct | Rm1 (Room A) | MoA-1.1
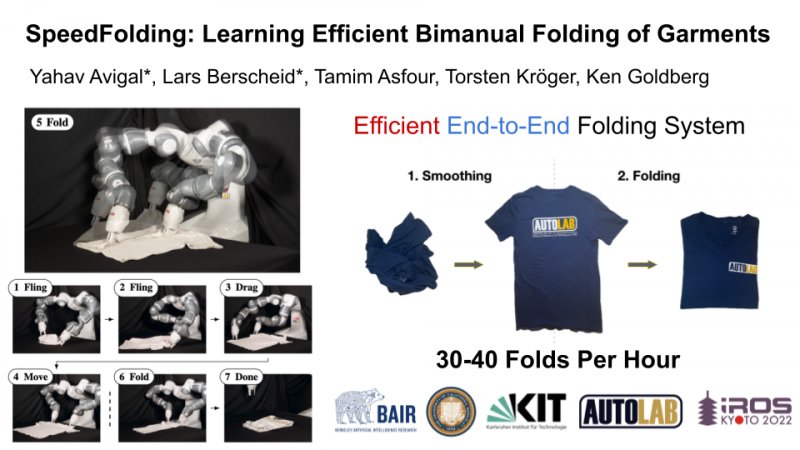
Folding garments reliably and efficiently is a long standing challenge in robotic manipulation due to the complex dynamics and high dimensional configuration space of garments. An intuitive approach is to initially manipulate the garment to a canonical smooth configuration before folding. In this work, we develop SpeedFolding, a reliable and efficient bimanual system, which given user-defined instructions as folding lines, manipulates an initially crumpled garment to (1) a smoothed and (2) a folded configuration. Our primary contribution is a novel neural network architecture that is able to predict pairs of gripper poses to parameterize a diverse set of bimanual action primitives. After learning from 4300 human-annotated and self-supervised actions, the robot is able to fold garments from a random initial configuration in under 120s on average with a success rate of 93%. Real-world experiments show that the system is able to generalize to unseen garments of different color, shape, and stiffness. While prior work achieved 3-6 Folds Per Hour (FPH), SpeedFolding achieves 30-40 FPH.
{kind=link}