15:00 - 15:15 | Wed 3 Jun | Room T10 | WeC10.2
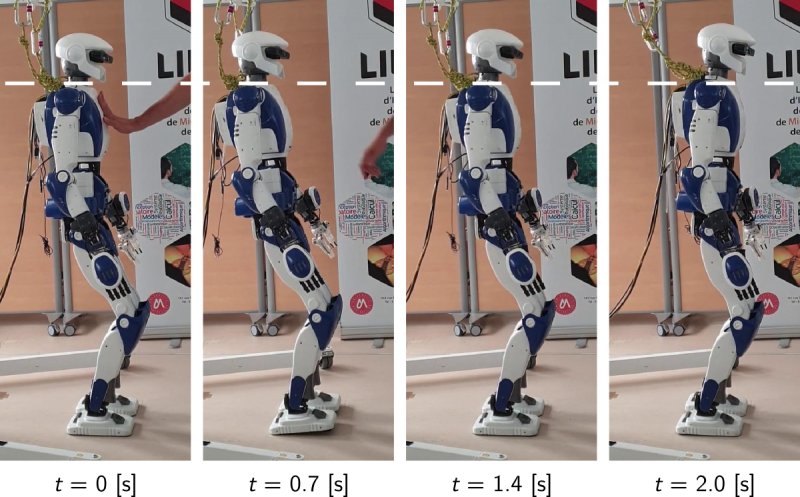
The variable-height inverted pendulum (VHIP) model enables a new balancing strategy by height variations of the center of mass, in addition to the well-known ankle strategy. We propose a biped stabilizer based on linear feedback of the VHIP that is simple to implement, coincides with the state-of-the-art for small perturbations and is able to recover from larger perturbations thanks to this new strategy. This solution is based on "best-effort" pole placement of a 4D divergent component of motion for the VHIP under input feasibility and state viability constraints. We complement it with a suitable whole-body admittance control law and test the resulting stabilizer on the HRP-4 humanoid robot.
{kind=link}