Shenli Yuan1, Austin Epps2, Jerome Nowak3, Kenneth Salisbury3
11:15 - 11:30 | Mon 1 Jun | Room T1 | MoB01.1
08:45 - 09:00 | Tue 2 Jun | Room T1 | TuA01.3
11:15 - 11:30 | Tue 2 Jun | Room T1 | TuB01.1
09:00 - 09:15 | Wed 3 Jun | Room T13 | WeA13.4
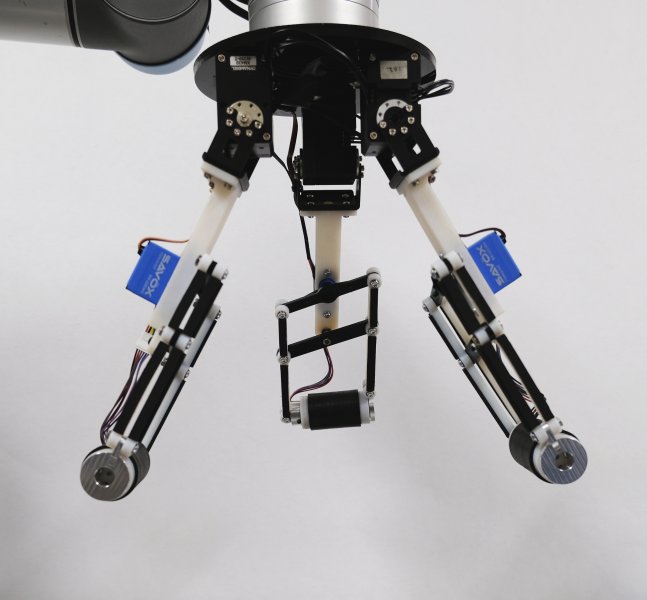
This paper describes the development of a novel non-anthropomorphic robot hand with the ability to manipulate objects by means of articulated, actively driven rollers located at the fingertips. An analysis is conducted and systems of equations for two-finger and three-finger manipulation of a sphere are formulated to demonstrate full six degree of freedom nonholonomic spatial motion capability. A prototype version of the hand was constructed and used to grasp and manipulate a variety of objects. Tests conducted with the prototype confirmed the validity of the mathematical analysis. Unlike conventional approaches to within-hand manipulation using legacy robotic hands, the continuous rotation capability of our rolling fingertips allows for unbounded rotation of a grasped object without the need for finger gaiting.
{kind=link}