Yoshito Okada1, Shotaro Kojima1, Kazunori Ohno1, Satoshi Tadokoro1
09:15 - 09:30 | Mon 1 Jun | Room T23 | MoA23.1
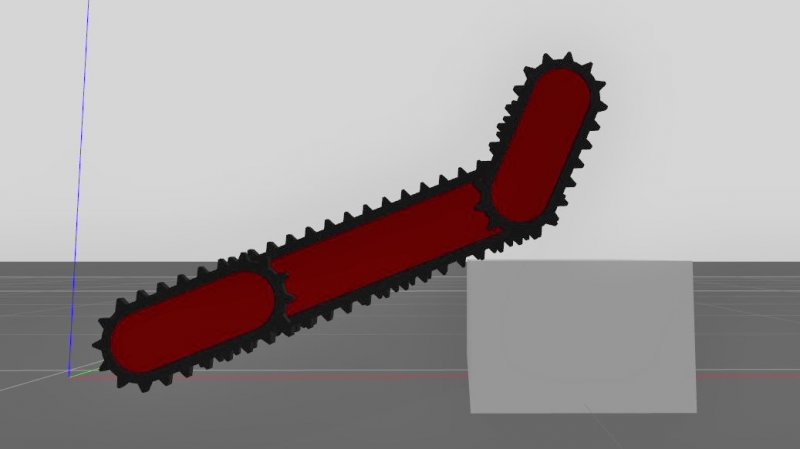
In this study, we developed a real-time simulation method for non-deformable continuous tracks having grousers for rough terrain by explicitly considering the collision and friction between the tracks and the ground. In the proposed simulation method, an arbitrary trajectory of a track is represented with multiple linear and circular segments, each of which is a link connected to a robot body. The proposed method sets velocity constraints between each segment link and the robot body, to simulate the track rotation around the body. To maintain the shape of a track, it also restores the positions of the segment links when required. Experimental comparisons with other existing real-time simulation methods demonstrated that while the proposed method considered the grousers and the friction with the ground, it was comparable to them in terms of the computational speed. Experimental comparison of the simulations based on the proposed method and a physical robot exhibited that the former was comparable to the precise motion of the robot on rough or uneven terrain.
{kind=link}