Jae Hyung Jung1, Chan Gook Park1
09:15 - 09:30 | Mon 1 Jun | Room T16 | MoA16.1
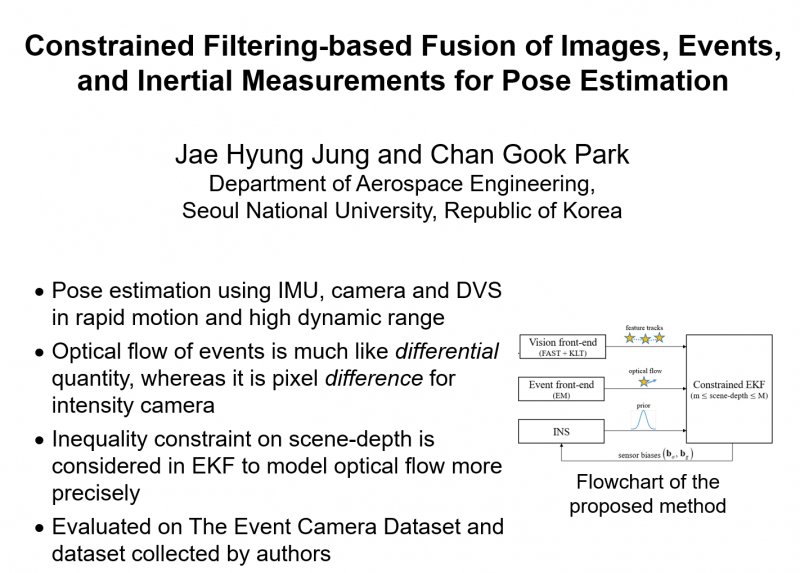
In this paper, we propose a novel filtering-based method that fuses events from a dynamic vision sensor (DVS), images, and inertial measurements to estimate camera poses. A DVS is a bio-inspired sensor that generates events triggered by brightness changes. It can cover the drawbacks of a conventional camera by virtual of its independent pixels and high dynamic range. Specifically, we focus on optical flow obtained from both a stream of events and intensity images in which the former is much like a differential quantity, whereas the latter is a pixel difference in a much longer time interval than events. This nature characteristic motivates us to model optical flow estimated from events directly, but feature tracks for images in the filter design. An inequality constraint is considered in our method since the inverse scene-depth is larger than zero by its definition. Furthermore, we evaluate our proposed method in the benchmark DVS dataset and a dataset collected by the authors. The results reveal that the presented algorithm has reduced the position error by 49.9% on average and comparable accuracy only using events when compared to the state-of-the-art filtering-based estimator.
{kind=link}