Akhil Padmanabha1, Frederik Ebert2, Stephen Tian2, Roberto Calandra3, Chelsea Finn4, Sergey Levine2
09:45 - 10:00 | Mon 1 Jun | Room T15 | MoA15.3
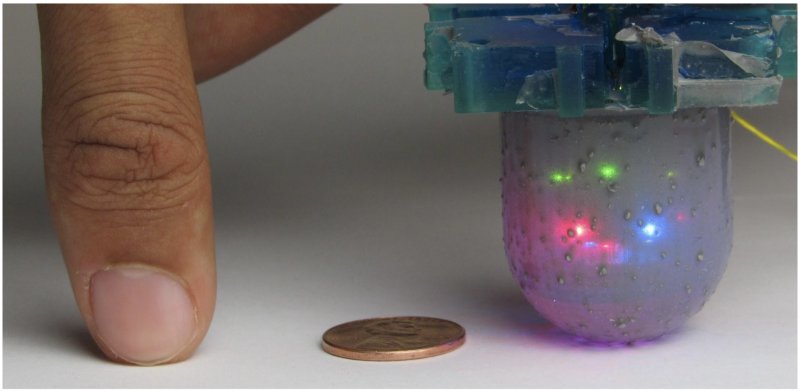
Incorporating touch as a sensing modality for robots can enable finer and more robust manipulation skills. Existing tactile sensors are either flat, have small sensitive fields or only provide low-resolution signals. In this paper, we introduce OmniTact, a multi-directional high-resolution tactile sensor. OmniTact is designed to be used as a fingertip for robotic manipulation with robotic hands, and uses multiple micro-cameras to detect multi-directional deformations of a gel-based skin. This provides a rich signal from which a variety of different contact state variables can be inferred using modern image processing and computer vision methods. We evaluate the capabilities of OmniTact on a challenging robotic control task that requires inserting an electrical connector into an outlet, as well as a state estimation problem that is representative of those typically encountered in dexterous robotic manipulation, where the goal is to infer the angle of contact of a curved finger pressing against an object. Both tasks are performed using only touch sensing and convolutional neural networks to process images from the sensor's cameras. We compare with a state-of-the-art tactile sensor that is only sensitive on one side, as well as a state-of-the-art multi-directional tactile sensor, and find that the combination of high-resolution and multi-directional sensing is crucial for reliably inserting the electrical connector and allows for higher accuracy in the state estimation task.
{kind=link}