Xi Lin1, Laurence Willemet1, Alexandre Bailleul2, Michael Wiertlewski3
09:15 - 09:30 | Mon 1 Jun | Room T15 | MoA15.1
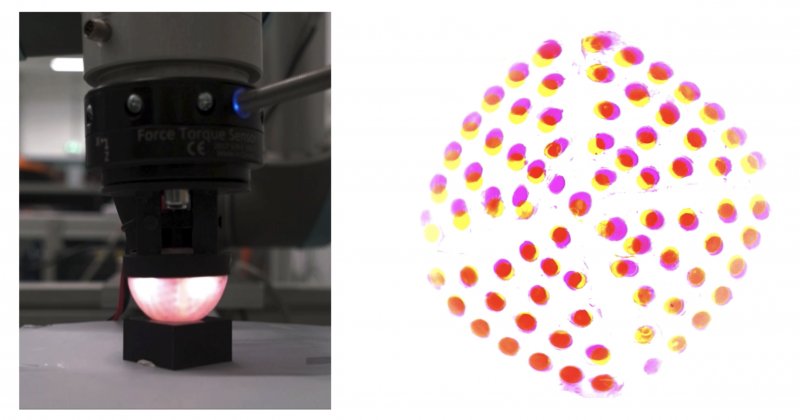
It is well accepted that touch is an important sensory channel to consider while planning of robotic manipulation tasks. Touch provides information about the state of contact and the local shape of the object which is central to fine manipulation. In this work, we present an evolution of our distributed tactile sensor which is able to measure the dense 3-dimensional displacement field of an elastic membrane, using the subtractive color-mixing principle. The manufacturing process employed allows us to design and manufacture the features of the sensor on a flat surface, then fold the resulting 2d structure into a spherical shape. The resulting 40mm-diameter spherical sensor has 77 measurement points, each of which gives an estimation of the local 3d displacement, normal and tangential to the surface. Each marker is built around 2 sets of colored patch placed at different depths. The first one reflects magenta light while the second is a translucent yellow filter that converts the magenta into the red. An embedded camera observes the lateral displacement and the resulting hue of the marker. To benchmark the sensor, we compared the measurement obtained while pressing the sensor on a curved surface with Hertz contact theory, which constitutes a classical contact mechanics problem. While Hertz contact assumes frictionless conditions, using the shear and normal sensing, ChromaTouch can estimate the curvature of an object after an indentation of the sensor of less than a millimeter.
{kind=link}