Mihir Rahul Dharmadhikari1, Tung Dang, Lukas Solanka2, Johannes Loje2, Dinh Huan Nguyen1, Nikhil Khedekar1, Kostas Alexis3
09:30 - 09:45 | Mon 1 Jun | Room T5 | MoA05.2
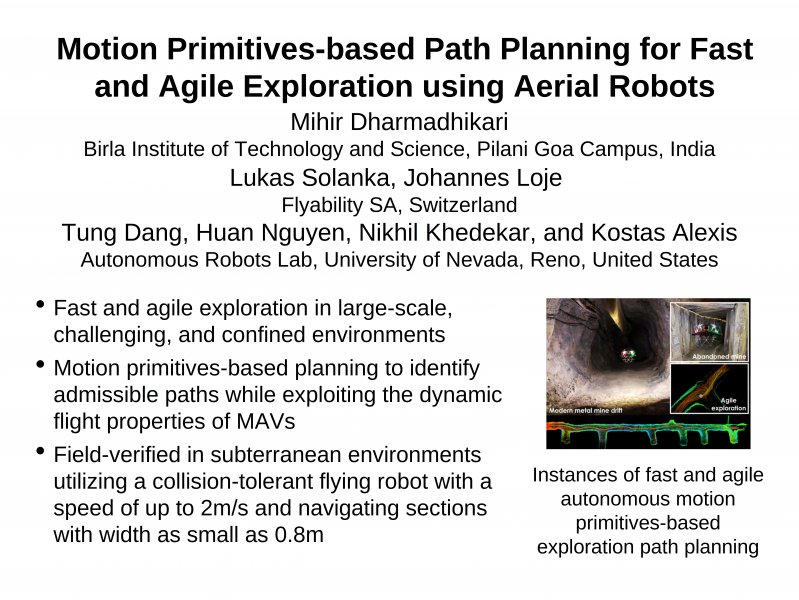
This paper presents a novel path planning strategy for fast and agile exploration using aerial robots. Tailored to the combined need for large-scale exploration of challenging and confined environments, despite the limited endurance of micro aerial vehicles, the proposed planning employs motion primitives to identify admissible paths that search the configuration space, while exploiting the dynamic flight properties of small aerial robots. Utilizing a computationally efficient volumetric representation of the environment, the planner provides fast collision-free and future-safe paths that maximize the expected exploration gain and ensure continuous fast navigation through the unknown environment. The new method is field-verified in a set of deployments relating to subterranean exploration and specifically, in both modern and abandoned underground mines in Northern Nevada utilizing a 0.55m-wide collision-tolerant flying robot exploring with a speed of up to 2m/s and navigating sections with width as small as 0.8m.
{kind=link}