Chao Huang1, Xin Chen2, Enyi Tang2, Mengda He3, Lei Bu2, Shengchao Qin3, Yifeng Zeng3
10:00 - 10:15 | Mon 1 Jun | Room T4 | MoA04.4
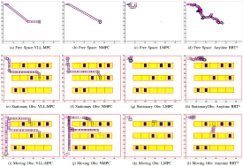
In this paper, we revisit model predictive control (MPC), for the classical wheeled mobile robot (WMR) navigation problem. We prove that the reachable set based hierarchical MPC (HMPC), a state-of-the-art MPC, cannot handle WMR navigation in theory due to the non-existence of non-trivial linear system with an under-approximate reachable set of WMR. Nevertheless, we propose a virtual linear leader based MPC (VLL-MPC) to enable HMPC structure. Different from current HMPCs, we use a virtual linear system with an under-approximate path set rather than the traditional reachable set to guide the WMR. We provide a valid construction of the virtual linear leader. We prove the stability of VLL-MPC, and discuss its complexity. In the experiment, we demonstrate the advantage of VLL-MPC empirically by comparing it with NMPC, LMPC and anytime RRT* in several scenarios.
{kind=link}