Lavanya Balasubramanian1, Tom Wray1, Dana Damian1
10:00 - 10:15 | Mon 1 Jun | Room T1 | MoA01.4
10:00 - 10:15 | Tue 2 Jun | Room T9 | TuB09.3
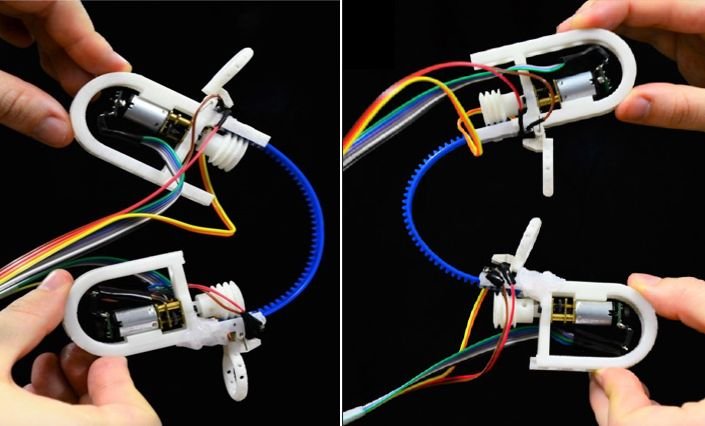
It is known that the interior of the human body is one of the most adverse environments for a foreign body, such as an in vivo robot, and vice-versa. As robots operating in vivo are increasingly recognized for their capabilities and potential for improved therapies, it is important to ensure their safety, especially for long term treatments when little supervision can be provided. We introduce an implantable robot that is flexible, extendable and symmetric, thus changing shape and size. This design allows the implementation of an effective fault tolerant control, with features such as physical polling for fault diagnosis, retraction and redundancy-based control switching at fault. We demonstrate the fault-tolerant capabilities for an implantable robot that elongates tubular tissues by applying tension to the tissue. In benchtop tests, we show a reduction of the fault risks by at least 83%. The study provides a valuable methodology to enhance safety and efficacy of implantable and surgical robots, and thus to accelerate their adoption.
{kind=link}