Changsheng Dai1, Zhuoran Zhang1, Yuchen Lu1, Guanqiao Shan1, Xian Wang1, Qili Zhao1, Yu Sun1
11:21 - 11:33 | Mon 20 May | Room 517c | MoA2.4
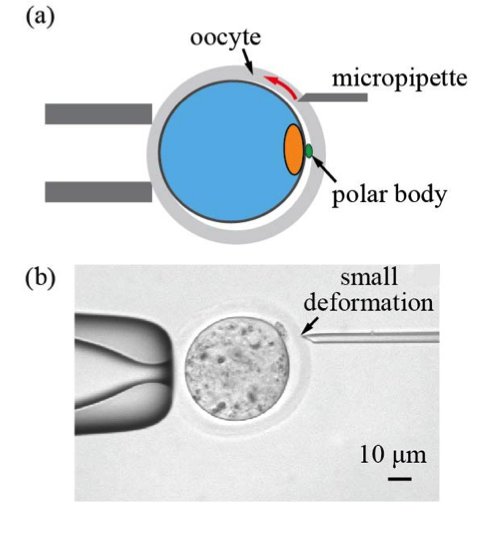
Robotic manipulation of deformable objects (vs. rigid objects) has been a classic topic in robotics. Compared to deformable synthetic objects such as rubber balls and clothes, biological cells are highly deformable and more prone to damage. This paper presents robotic manipulation of deformable cells for orientation control (both out-of-plane and in-plane), which is required in both clinical (e.g., in vitro fertilization) and biomedical (e.g., clone) applications. Compared to manual cell rotation based on empirical experience, the robotic approach, based on mathematical modeling and path planning, effectively rotates a cell while consistently maintaining minimal cell deformation to avoid cell damage. A force model is established to determine the minimal force applied by the micropipette to rotate a spherical or more generally, an ellipsoidal mouse oocyte. The force information is translated into indentation through a contact mechanics model, and the manipulation path of the micropipette is formed by connecting the indentation positions on the oocyte. A compensation controller is designed to compensate for the variations of mechanical properties across cells. The polar body of an oocyte is detected by deep neural networks with robustness to shape and size differences. Experimental results demonstrate that the system achieved an accuracy of 97.6% in polar body detection and an accuracy of 0.7 degree in oocyte orientation control with maximum oocyte deformation of 2.69 um.
{kind=link}