Fulin Tang1, Heping Li1, Yihong Wu2
10:45 - 12:00 | Mon 20 May | Room 220 POD 04 | MoA1-04.1
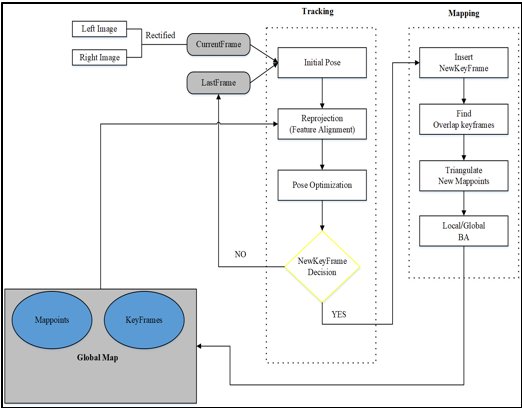
We propose a novel stereo visual SLAM framework considering both accuracy and speed at the same time. The framework makes full use of the advantages of key-feature-based multiple view geometry (MVG) and direct-based formulation. At the front-end, our system performs direct formulation and constant motion model to predict a robust initial pose, reprojects local map to find 3D-2D correspondence and finally refines pose by the reprojection error minimization. This front-end process makes our system faster. At the back-end, MVG is used to estimate 3D structure. When a new keyframe is inserted, new mappoints are generated by triangulating. In order to improve the accuracy of the proposed system, bad mappoints are removed and a global map is kept by bundle adjustment. Especially, the stereo constraint is performed to optimize the map. This back-end process makes our system more accurate. Experimental evaluation on EuRoC dataset shows that the proposed algorithm can run at more than 100 frames per second on a consumer computer while achieving highly competitive accuracy.
{kind=link}