Paul Glotfelter1, Magnus Egerstedt1
10:30 - 13:00 | Tue 22 May | podM | [email protected]
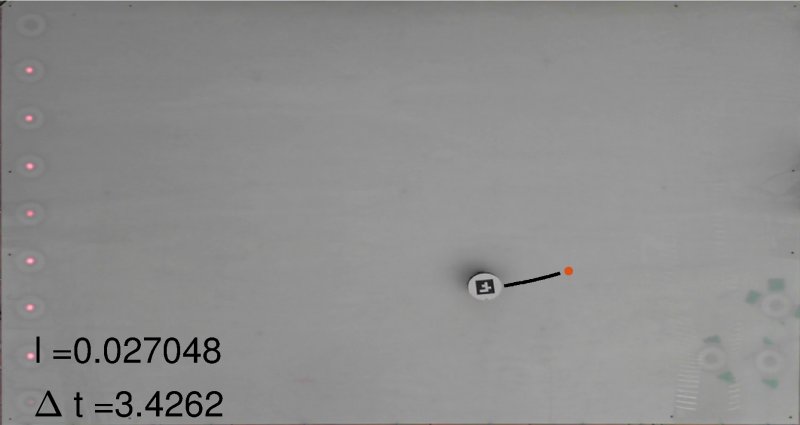
When designing control strategies for differential-drive mobile robots, one standard tool is the consideration of a point at a fixed distance along a line orthogonal to the wheel axis instead of the full pose of the vehicle. This abstraction supports replacing the non-holonomic, three-state unicycle model with a much simpler two-state single-integrator model (i.e., a velocity-controlled point). Yet this transformation comes at a performance cost, through the robot's precision and maneuverability. This work contains derivations for expressions of these precision and maneuverability costs in terms of the transformation's parameters. Furthermore, these costs show that only selecting the parameter once over the course of an application may cause an undue loss of precision. Model Predictive Control (MPC) represents one such method to ameliorate this condition. However, MPC typically realizes a control signal, rather than a parameter, so this work also proposes a Parametric Model Predictive Control (PMPC) method for parameter and sampling horizon optimization. Experimental results are presented that demonstrate the effects of the parameterization on the deployment of algorithms developed for the single-integrator model on actual differential-drive mobile robots.
{kind=link}