Mustafa Mashali1, Lei Wu2, Redwan Alqasemi2, Rajiv Dubey2
10:30 - 13:00 | Tue 22 May | podM | [email protected]
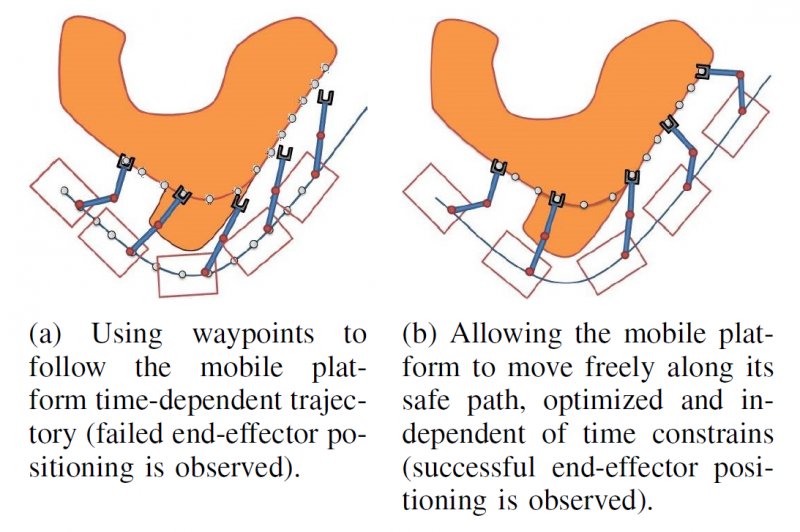
In this work, we propose a straightforward control method that provides sufficient freedom to the end-effector to complete a task that is bound by time-dependent constraints. This is achieved by relaxing the time constraints on the mobile base trajectory in a floor space obstructed by obstacles. The trajectory of the platform is determined by sensor-assisted obstacle avoidance algorithm such that a single degree of freedom mobility can be represented through a safe obstaclefree time-independent path. The proposed control method is implemented in simulation and on physical hardware built in our labs. The simulation included a 5-DoF redundant Planar Mobile Manipulator (PMM). The hardware implementation and testing utilized a 9-DoF redundant mobile manipulator. The implementation results demonstrate the effectiveness of the control method in adjusting the mobile platform motion along its allowed obstacle-free path to enable the end-effector to follow its trajectory for task completion that would otherwise fail to complete when conventional control methods are used.
{kind=link}