David Saldaña1, Bruno Gabrich2, Guanrui Li2, Mark Yim3, Vijay Kumar2
10:30 - 13:00 | Tue 22 May | podM | [email protected]
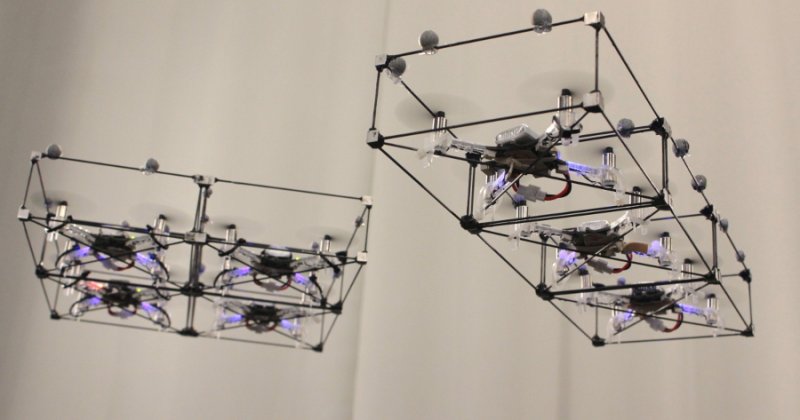
We introduce ModQuad, a novel flying modular robotic structure that is able to self-assemble in midair and cooperatively fly. The structure is composed by agile flying modules that can easily move in a three dimensional environment. The module is based on a quadrotor platform within a cuboid frame which allows it to attach to other modules by matching vertical faces. Using this mechanism, a ModQuad swarm is able to rapidly assemble flying structures in midair using the robot bodies as building units. In this paper, we focus on two important tasks for modular flying structures. First, we propose a decentralized modular attitude controller to allow a team of physically connected modules to fly cooperatively. Second, we develop a docking method that drives pairs of structures to be attached in midair. Our method precisely aligns, and corrects motion errors during the docking process. In our experiments, we tested and analyzed the performance of the cooperative flying method for multiple configurations. We also tested the docking method with successful results.
{kind=link}