10:30 - 13:00 | Tue 22 May | podL | [email protected]
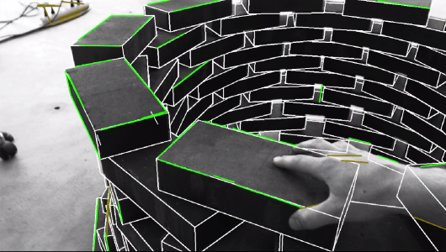
In this paper, a system is presented to track the motion of a sensor-head relative to multiple objects of known geometry. Measurements from a monocular camera and an inertial measurement unit are probabilistically fused in a moving horizon estimator to obtain high accuracy estimates. Methods for detecting tracking loss and automatically resuming tracking are presented. The performance of the system is shown through experiments tracking various objects and ground truth measurements demonstrate the systems ability to provide accurate real-time motion estimates. As an initial application of the system, a 100 brick structure with complex geometry was built by hand using the tracking system and an augmented reality visualizer to guide construction.
{kind=link}