10:30 - 13:00 | Tue 22 May | podL | [email protected]
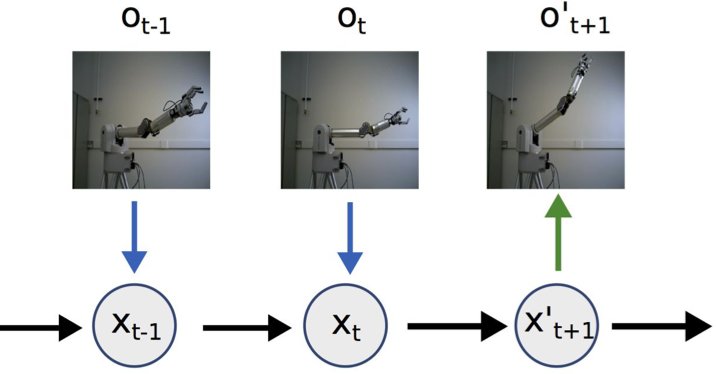
We consider the problems of learning forward models that map state to high-dimensional images and inverse models that map high-dimensional images to state in robotics. Specifically, we present a perceptual model for generating video frames from state with deep networks, and provide a framework for its use in tracking and prediction tasks. We show that our proposed model greatly outperforms standard deconvolutional methods and GANs for image generation, producing clear, photo-realistic images. We also develop a convolutional neural network model for state estimation and compare the result to an Extended Kalman Filter to estimate robot trajectories. We validate all models on a real robotic system.
{kind=link}