Tao Wang1, Haibin Ling2, Congyan Lang1, Songhe Feng3, Yi Jin1, Yidong Li4
10:30 - 13:00 | Tue 22 May | podL | [email protected]
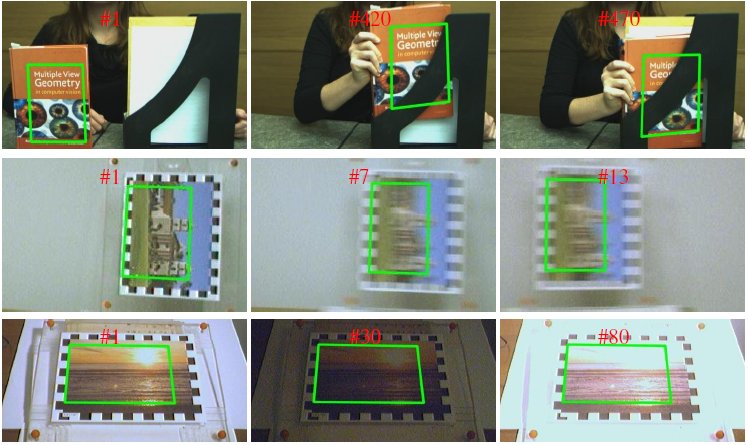
Tracking planar objects has a wide range of applications in robotics. Conventional template tracking algorithms, however, often fail to observe fast object motion or drift significantly after a period of time, due to drastic object appearance change. To address such challenges, we propose a novel constrained confidence matching algorithm for motion estimation and a robust Kalman filter for template updating. Integrated with an accurate occlusion detector, our approach achieves accurate motion estimation in presence of partial occlusion, by excluding occluded pixels from computation of motion parameters. Furthermore, the proposed Kalman filter employs a novel control-input model to handle the object appearance change, which brings our tracker high robustness against sudden illumination change and heavy motion blur. For evaluation, we compare the proposed tracker with several state-of-the-art planar object trackers on two public benchmark datasets. Experimental results show that our algorithm achieves robust tracking results against various environmental variations, and outperforms baseline algorithms remarkably on both datasets.
{kind=link}