Michael Beetz1, Daniel Beßler2, Andrei Haidu3, Mihai Pomarlan4, Asil Kaan Bozcuoglu1, Georg Bartels2
10:30 - 13:00 | Tue 22 May | podJ | [email protected]
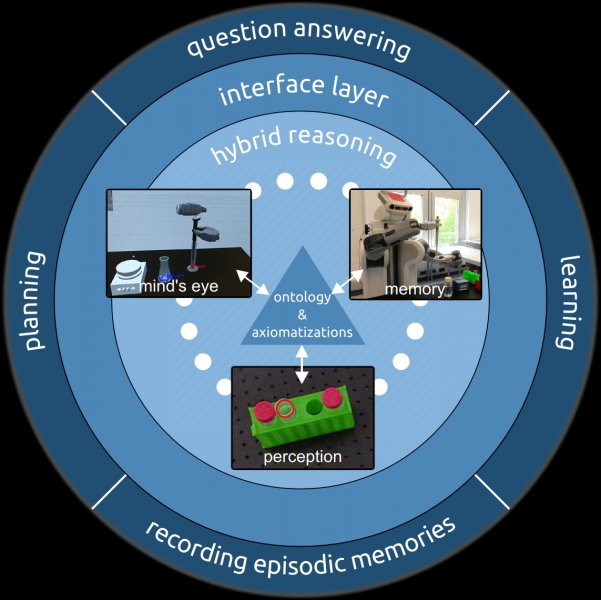
In this paper we present KnowRob 2.0, a second generation knowledge representation and reasoning framework for robotic agents. KnowRob 2.0 is an extension and partial redesign of KnowRob, currently one of the most advanced knowledge processing for robots that has enabled them to successfully perform complex manipulation tasks such as making pizza, conducting chemical experiments, and setting tables. The knowledge base appears to be a conventional first-order time interval logic knowledge base, but it exists to a large part only virtually: many logical expressions are constructed on demand from data structures of the control program, computed through robotics algorithms including ones for motion planning and solving inverse kinematics problems, and log data stored in noSQL databases. Novel features and extensions of KnowRob 2.0 substantially increase the capabilities of robotic agents of acquiring open-ended manipulation skills and competence, reasoning about how to perform manipulation actions more realistically, and acquiring commonsense knowledge.
{kind=link}