Petr Váňa1, Jakub Sláma1, Jan Faigl1
10:30 - 13:00 | Tue 22 May | podG | [email protected]
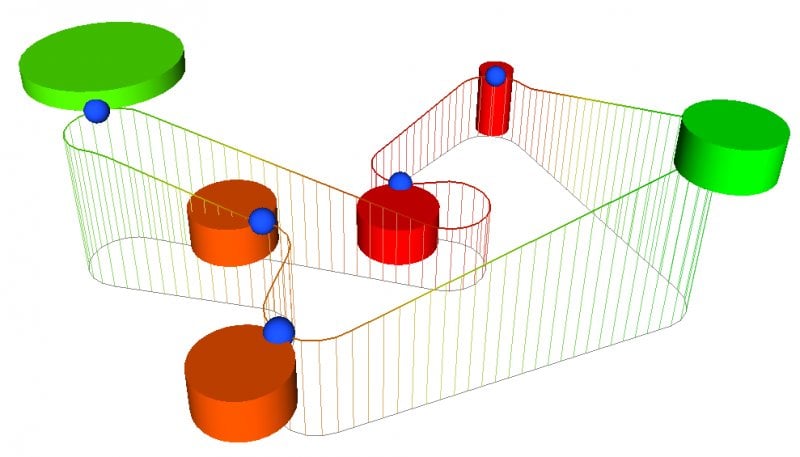
We introduce an extension of the Dubins Traveling Salesman Problem with Neighborhoods into the 3D space in which a fixed-wing aerial vehicle is requested to visit a set of target regions while the vehicle motion constraints are satisfied, i.e., the minimum turning radius and maximum climb and dive angles. The primary challenge is to address both the combinatorial optimization part of finding the sequence of target visits and the continuous optimization part of the final trajectory determination. Due to its high complexity, we propose to address both parts of the problem separately by a decoupled approach in which the sequence is determined by a new distance function designed explicitly for the utilized 3D Dubins Airplane model. The final trajectory is then found by a local optimization which improves the solution quality. The proposed approach provides significantly better solutions than using Euclidean distance in the sequencing part of the problem. Moreover, the found solutions are of the competitive quality to the sampling-based algorithm while its computational requirements are about two orders of magnitude lower.
{kind=link}