Jung Hoon Kim1, Sung-Moon Hur2, Yonghwan Oh2
10:30 - 13:00 | Tue 22 May | podF | [email protected]
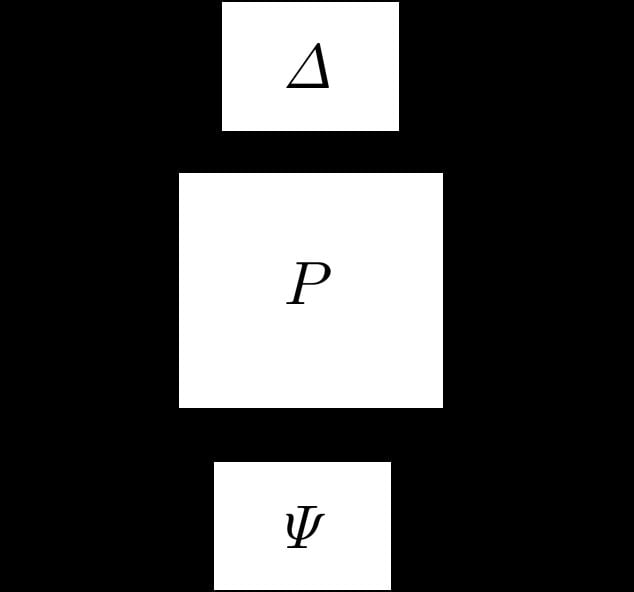
This paper revisits computed torque method for robot manipulators and aims at developing its new framework based on the $L_1$ robustness, in which the $L_infty$ norm together with its induced norm is employed to characterize model uncertainties and a performance measure. More precisely, we consider the $L_1$ robust stability and performance for a given robot manipulator with a computed torque controller. We first show that the modelling errors in the computed torque method can be divided into an exogenous disturbance and a multiplicative model uncertainty, which are bounded in terms of the $L_infty$ norm and its induced norm, respectively. It is next shown that the robot manipulator with the computed torque controller can be equivalently represented by an interconnection of a continuous-time linear time-invariant (LTI) nominal plant and a stabilizing controller together with the $L_infty$-induced norm bounded model uncertainty. Based on the interconnected representation, the $L_1$ robust stability condition and an upper bound of the $L_1$ performance against the exogenous disturbance with respect to all model uncertainties in a class of a bounded $L_infty$-induced norm are dealt with by using the small-gain theorem. Finally, the effectiveness of the theoretical results is demonstrated through some experiment results.
{kind=link}