Felix Beuke1, Sergey Alatartsev2, Simon Jessen1, Alexander Verl3
10:30 - 13:00 | Tue 22 May | podF | [email protected]
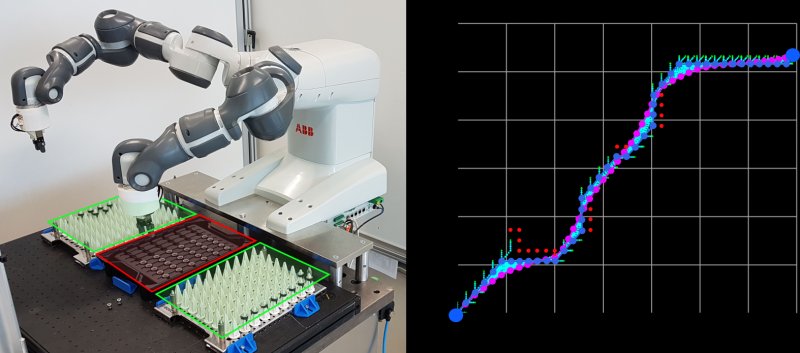
The need for temporal and spatial coordination of two robot arms moving independently in a shared workspace frequently arises in industrial and service-oriented robotics alike. Today, this problem is often solved manually, leading to a negative impact on user experience as well as on execution performance. In this paper, we present an algorithm that is able to automatically coordinate independently planned motions of a dual-arm manipulator during execution. In addition, the algorithm is capable of refining the plan upon receiving new motion commands during the robot motion. We demonstrate the effectiveness and efficiency of the proposed approach on an ABB YuMi robot working on an industrial palletizing task.
{kind=link}