David Busson1, Richard Bearee1
10:30 - 13:00 | Tue 22 May | podF | [email protected]
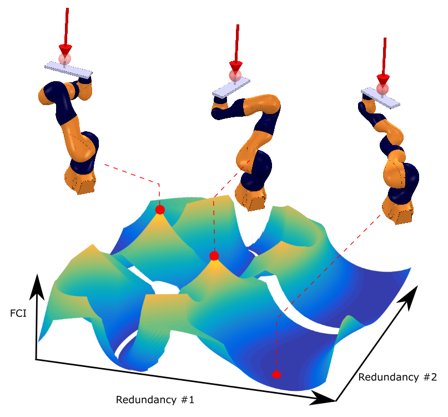
Assembly and drilling tasks are commonly allocated to robots in the production industry, and are often operations where the manipulator holds a static configuration while the end-effector physically interacts with the environment. Carrying its own weight while countering forces may be too much for a limited payload robot in certain configurations. Kinematic redundancy with regard to a task allows a robot to perform it in a continuous space of articular configurations; space in which the payload of the robot may vary dramatically. It may be impossible to hold a physical interaction in some configurations, while it may be easily sustainable in others that bring the end-effector to the same location. This paper describes a framework for this kind of operations, in which kinematic redundancy is used to explore the full extent of a force capacity for a given manipulator and task. A pragmatic force capacity index is proposed. This index offers a sound basis for redundancy resolution via optimization or complete redundancy exploration, and may provide good hints for end-effector design. A practical use case with a 7-axis KUKA LBR iiwa was used to demonstrate the relevance of the proposed method.
{kind=link}