Niels Dehio1, Joshua Smith2, Dennis Wigand3, Guiyang Xin4, Hsiu-Chin Lin2, Jochen Steil5, Michael Mistry2
10:30 - 13:00 | Tue 22 May | podF | [email protected]
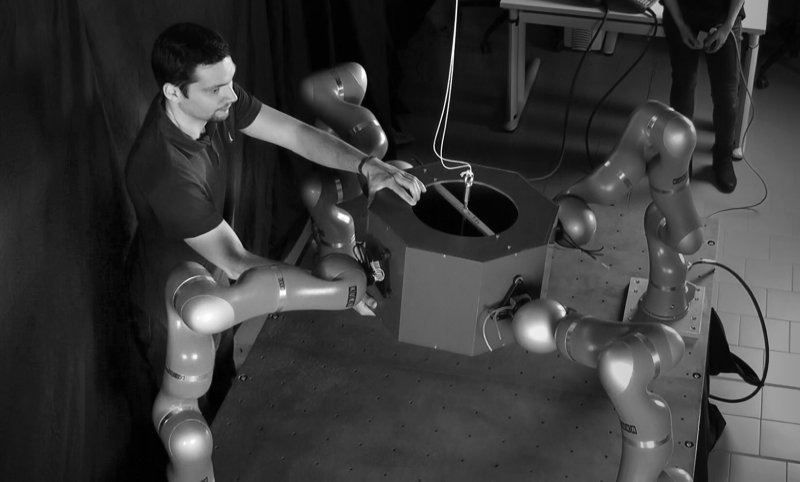
We consider a virtual manipulator in grasping scenarios which allows us to capture the effect of the object dynamics. This modeling approach turns a multi-arm robot into an underactuated system. We observe that controlling floating-base multi-leg robots is fundamentally similar. The Projected Inverse Dynamics Control approach is employed for decoupling contact consistent motion generation and controlling contact wrenches. The proposed framework for underactuated robots has been evaluated on an enormous robot hand composed of four KUKA LWR IV+ representing fingers cooperatively manipulating a 9kg box with total 28 actuated DOF and six virtual DOF representing the object as additional free-floating robot link. Finally, we validate the same approach on ANYmal, a floating-base quadruped with 12 actuated DOF. Experiments are performed both in simulation and real world.
{kind=link}