Nikhil Chavan Dafle1, Alberto Rodriguez1
10:30 - 13:00 | Tue 22 May | podE | [email protected]
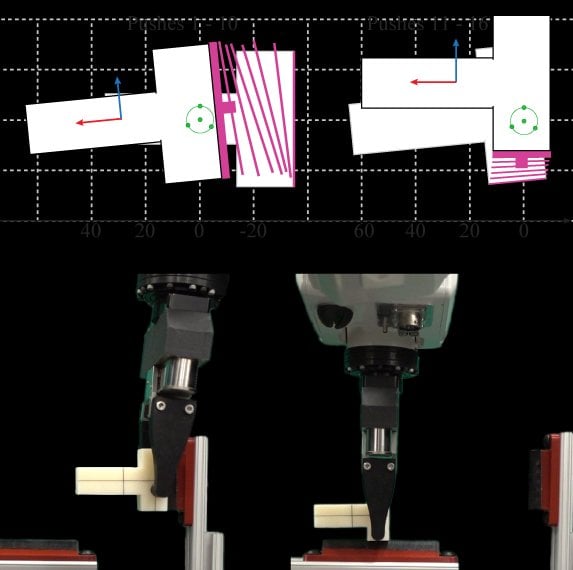
This paper presents an approach to in-hand manipulation planning that exploits the mechanics of alternating sticking contact. Particularly, we consider the problem of manipulating a grasped object using external pushes for which the pusher sticks to the object. Given the physical properties of the object, frictional coefficients at contacts and a desired regrasp on the object, we propose a sampling-based planning framework that builds a pushing strategy concatenating different feasible stable pushes to achieve the desired regrasp. An efficient dynamics formulation allows us to plan in-hand manipulations 100-1000 times faster than our previous work which builds upon a complementarity formulation. Experimental observations for the generated plans show that the object precisely moves in the grasp as expected by the planner.
{kind=link}