Balakumar Sundaralingam1, Tucker Hermans
10:30 - 13:00 | Tue 22 May | podE | [email protected]
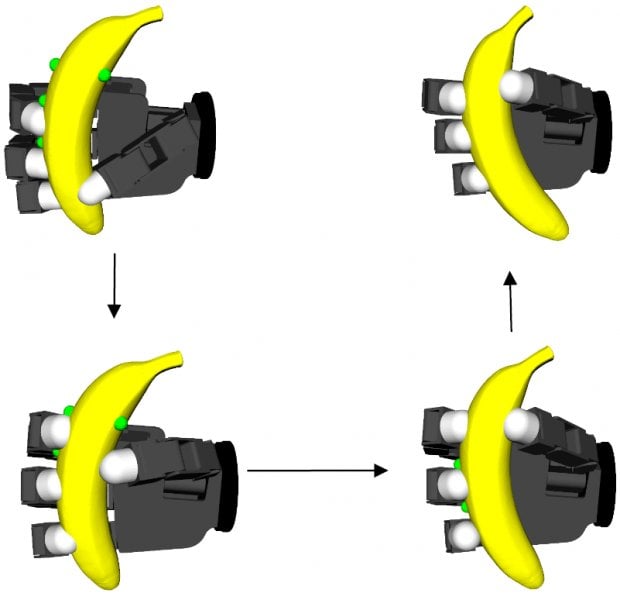
This paper explores the problem of autonomous, in-hand regrasping--the problem of moving from an initial grasp on an object to a desired grasp using the dexterity of a robot's fingers. We propose a planner for this problem which alternates between finger gaiting, and in-grasp manipulation. Finger gaiting enables the robot to move a single finger to a new contact location on the object, while the remaining fingers stably hold the object. In-grasp manipulation moves the object to a new pose relative to the robot's palm, while maintaining the contact locations between the hand and object. Given the object's geometry (as a mesh), the hand's kinematic structure, and the initial and desired grasps, we plan a sequence of finger gaits and object reposing actions to reach the desired grasp without dropping the object. We propose an optimization based approach and report in-hand regrasping plans for 5 objects over 5 in-hand regrasp goals each. The plans generated by our planner are collision free and guarantee kinematic feasibility.
{kind=link}