D. Navarro-Alarcon1, Yunhui Liu2
10:30 - 13:00 | Tue 22 May | podD | [email protected]
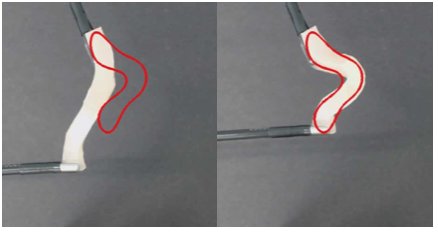
This paper addresses the design of a vision-based method to automatically deform soft objects into desired two-dimensional shapes with robot manipulators. The method presents an innovative feedback representation of the object's shape (based on a truncated Fourier series) and effectively exploits it to guide the soft object manipulation task. A new model calibration scheme that iteratively approximates a local deformation model from vision and motion sensory feedback is derived; this estimation method allows us to manipulate objects with unknown deformation properties. Pseudocode algorithms are presented to facilitate the implementation of the controller. Numerical simulations and experiments are reported to validate this new approach.
{kind=link}