Takayuki Matsuno1, Tomoya Shirakawa1, Tomotoshi Watanabe1, Mamoru Minami1
10:30 - 13:00 | Tue 22 May | podD | [email protected]
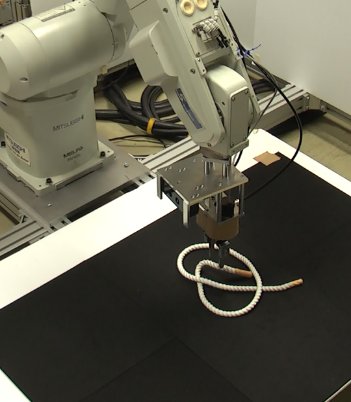
Recently, the demand to manipulate deformable objects such as a string and cloth by robots is growing. The reason is that it has the possibility of making our lives more convenient in many domains such as housework, manufacturing and medical field. However, manipulation of deformable objects is more difficult than that of rigid objects, because deformable objects have diversity of shape and behavior. Therefore, our research group has been focusing on the string shape operation by a robot. This paper describes planning method of string untying operation based on knot theory and algorithms to generate the motion of a manipulator. The novel contribution of our planning method is automatic selection of optimal shape operation based on cost function. Reidemeister moves and Cross, which are units of shape operations defined in Knot Theory, are divided into several groups. Additionally, heuristic cost are set up. Our algorithms to generate the motion of a manipulator is a deterministic approach and do not include learning or teaching-playback. The advantages of our method are automatic robot motion generation and disuse of teacher data. At final, the result of string untying experiment is reported.
{kind=link}