Laura Blumenschein1, Lucia Gan2, Jonathan Fan2, Allison Okamura2, Elliot Wright Hawkes3
10:30 - 13:00 | Tue 22 May | podD | [email protected]
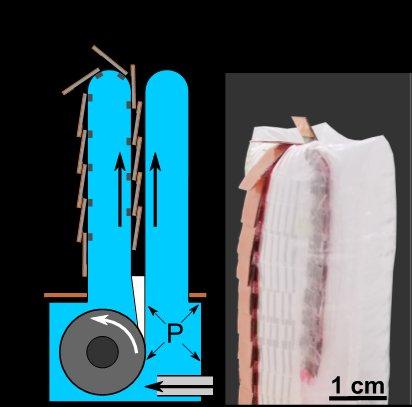
Antennas are essential in wireless communications and powering systems. Applications such as search and rescue and space exploration would greatly benefit from antenna reconfigurability, as well as antenna deployment from a compact and easy-to-transport form. We present the design and analysis of a reconfigurable and deployable antenna that uses a growing soft robot to form the three-dimensional antenna structure. Our approach is based on a pneumatic tip-extending robot instrumented with a conducting element. The robot increases its length to enable antenna deployment and changes shape to enable antenna reconfiguration. As a model system, we demonstrate a monopole antenna design that uses conducting elements formed from a copper strip that is mechanically disconnected at the leading edge of growth to change the length of the antenna and, as a result, change the resonant frequency. To achieve desired operating frequencies, return loss data from the antenna was used as feedback in a closed-loop system to control the antenna configuration. Our monopole supports a frequency tuning range that spans from 0.4 to 2 GHz and can tune between two target frequencies in approximately one second. We also show that the addition of branching and integrated actuators can be used to generate more complex and diverse antenna shapes. Branching is implemented in a model Yagi-Uda antenna and we explore the integration of pull cable actuators and pneumatic actuators with a model helical antenna.
{kind=link}