Alberto Favaro1, Leonardo Cerri1, Stefano Galvan2, Ferdinando Rodriguez Y Baena3, Elena De Momi1
10:30 - 13:00 | Tue 22 May | podA | [email protected]
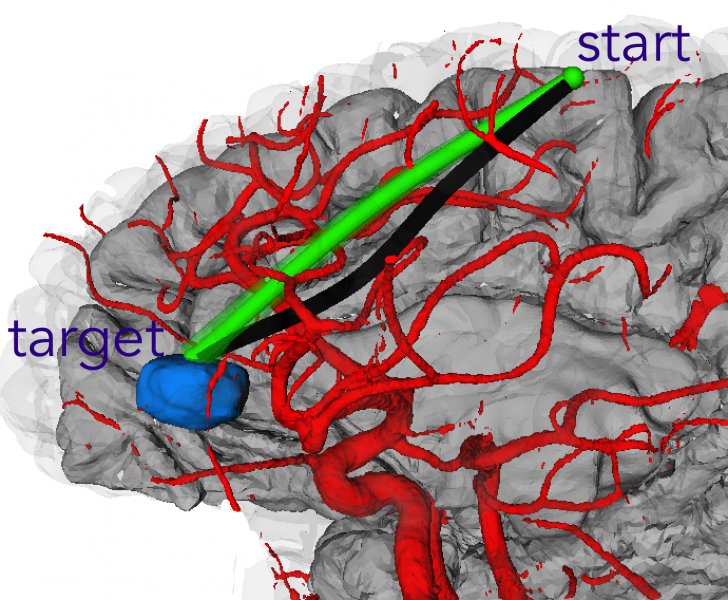
In this paper, an automatic planner for minimally invasive neurosurgery is presented. The solution provides the neurosurgeon with the best path to connect a user-defined entry point with a target in accordance with a specific cost function. The approach guarantees the avoidance of obstacles which can be found along the insertion pathway. The method is tailored to the EDEN2020 programmable bevel-tip needle, a multi- segment steerable probe intended to be used to perform drug delivery for the treatment of glioblastomas. A sample-based heuristic search inspired by the BIT* algorithm is used to define the asymptotically-optimal solution in terms of path length, followed by a smoothing phase to meet the required kinematic constraints of the needle. To account for inaccuracies in catheter modeling, which could determine unexpected control errors over the insertion procedure, an uncertainty margin is defined in order to increase the algorithms safety. The feasibility of the proposed solution was demonstrated by testing the method in simulated neurosurgical scenarios with different degrees of obstacle occupancy and against other sample-based algorithms present in literature: RRT, RRT* and an enhanced version of the RRT-Connect.
{kind=link}