Korbinian Nottensteiner1, Katharina Hertkorn2
10:05 - 10:10 | Tue 30 May | Room 4813/4913 | TUA11.3
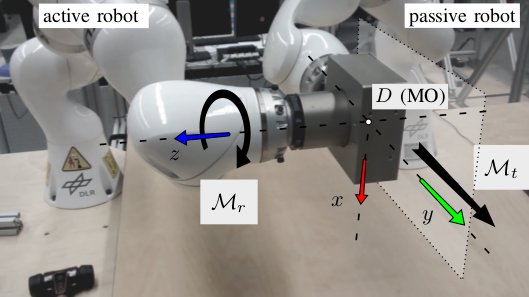
In fast changing assembly scenarios, it is required to adapt the task execution on the current state of the setup without extensive calibration routines. Therefore, it is important to estimate the geometric uncertainties and contact states during and not in advance of the assembly execution. We use a sequential Monte-Carlo (SMC) method to track workpiece poses during a robotic assembly based on joint torque and position measurements only. In contrast to existing approaches, we focus on assembly tasks where the workpiece is not fixed in the workcell, but can for example slide on a table surface. We propose a new constraint-based propagation model for the SMC approach which is inspired by time domain passivity control: A compensation motion for the samples dependent on the violation of contact constraints is derived. This allows us to track the motion of the workpieces, whereas a common random diffusion model fails. The method is evaluated with experiments using an assembly scenario with two KUKA LBR iiwa robot arms and shows accurate tracking performance.
{kind=link}