Yaohui Chen1, Sing Le1, Qiao Chu Tan1, Oscar Lau1, Fang Wan2, Chaoyang Song1
10:20 - 10:25 | Tue 30 May | Room 4011 | TUA1.6
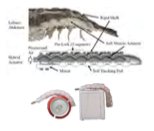
Classical rigid-bodied robotic systems are presented with proven success in theoretical development and industrial applications, are recently challenged by the emergence of soft robotics due to a growing need in physical human-robot interactions (pHRI), such as wearable devices, medical robots, personal robots, etc. In this paper, we present the design and fabrication of a robust, hybrid bending actuator build from both rigid and soft components inspired by crustaceans, where its bending radius and axis can be mechanically programmed through the selective activation of the rigid exterior joints, actuated by the soft actuators inside. The hybrid actuator was experimentally measured in terms of bending and force tests to demonstrate the utility of this design. Finally, a case study was presented to demonstrate its capacity to better shape conform to specific objects with adjustable degrees of freedom (DOFs), anticipating its potential application in situations where compliance is the priority.
{kind=link}